Dalian 1-Lianli Satellite [Document]
卫星概述 Overview
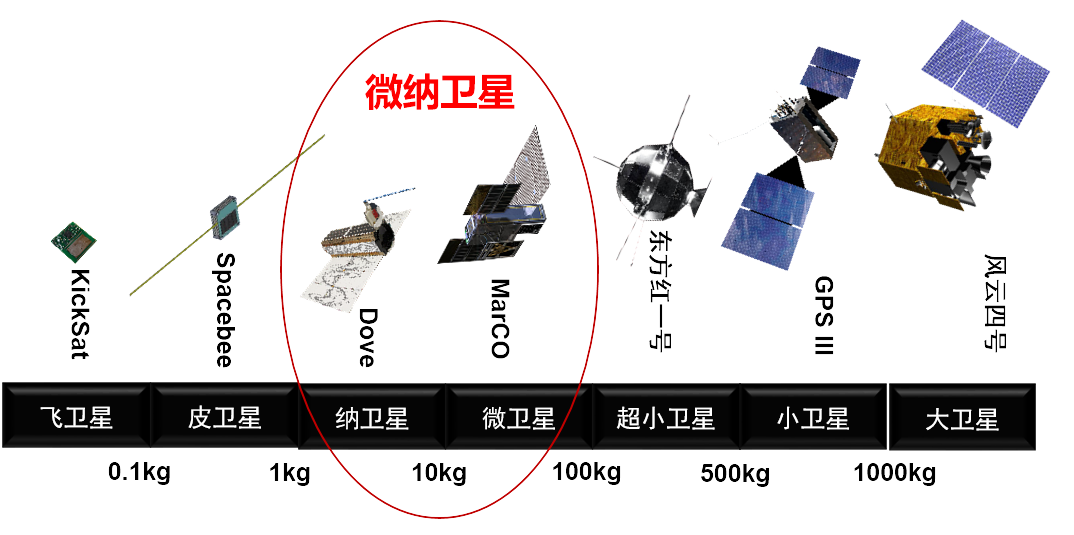
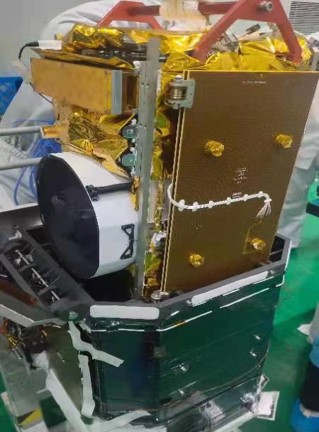
大连1号—连理卫星(Lianli)(以下简称连理卫星)是一颗12U的高分辨率对地遥感立方星,质量为17 kg,体积为416mm×317mm×291.3mm,并使用大连理工大学自有X频段地面测控站(辽宁省第一套地面站)进行测控,主要功能是验证高分辨率遥感成像、国产高可靠OpenHarmony操作系统、先进卫星部组件与基于3D打印技术的超轻型部署器等一系列创新技术。
Dalian1-Lianli Satellite (hereinafter referred to as “Lianli”) is a 12U high-resolution remote sensing CubeSat with a mass of 17 kg and a size of 416mm×317mm×291.3mm controlled by Dalian University of Technology’s own X-band ground control station (the first ground station in Liaoning Province). The CubeSat mainly serves as a verification of innovative technologies including but not limited to high-resolution remote sensing imaging, homemade high-reliable OpenHarmony operating system, advanced satellite components and 3D printing based ultra-light deployer.
卫星的主载荷为高分辨率多光谱相机,相机具有全色谱和多光谱共5个谱段,能够在轨实现低成本亚米级高分辨率的海洋/对地观测。OpenHarmony操作系统与国产处理芯片综合方案的使用,让系统的性能与可靠性大幅提高。不同于传统的卫星姿轨控动力系统所采用的肼类有毒推进剂,这颗卫星使用了创新的硝酸羟胺(HAN)单组元模块推进系统,具有绿色无毒、能量高、功耗低、可预包装等特点,大幅提升了微纳卫星在轨快速机动能力。
The main payload of Lianli is a high-resolution multispectral camera with 5 PMS bands, which is capable of achieving orbital sub-metre high-resolution ocean/land observation at a low cost. The use of OpenHarmony operating system and integrated programme of homemade chips(国产处理芯片综合方案) has significantly improved the performance and reliability of the system. Unlike the traditional toxic hydrazine propellants used in GNC systems, Lianli employs innovative HAN monopropellant propulsion system with the features of environmental-friendly, non-toxic, high in energy, low in power consumption and being available for pre-packaging, improving the CubeSat’s rapid orbital maneuverability(在轨快速机动能力) greatly.
北京时间2024年1月18日14时许,连理卫星从天舟六号货运飞船成功释放入轨,现正常在轨飞行。
Lianli was successfully released from Tianzhou-6 at about 1400 BST on January 18th 2024 and in now flying normally in orbit.
总体指标 Overall Indicators
| 指标名称 | 设计值 | 指标名称 | 设计值 |
|---|---|---|---|
| 轨道 | 400 km x 400 km | 定轨精度 | 优于5m(1σ) |
| 轨道倾角 | 42.8° | 国际卫星标识符 | 2023-063A |
| 姿态确定精度 | 优于0.03°(3σ) | 姿态指向精度 | 优于0.05°(3σ) |
| 姿态稳定度 | 优于0.003°/s(3σ) | 姿态机动能力 | 优于2°/s |
| 母线电压 | 9~12.3V | 蓄电池容量 | ≥15Ah |
| 数传模式 | 明传/密传 | 数传码速率 | 400Mbps |
| 分辨率 | 优于1m@400km | 推扫幅宽 | 优于9.2km@400km |
| 卫星质量 | 17kg | 卫星寿命 | ≥1年 |
| Name | Designed Value | Name | Designed Value |
|---|---|---|---|
| Orbit | 400 km x 400 km | Orbit Determination Accuracy | less than 5m(1σ) |
| Inclination | 42.8° | COSPAR ID | 2023-063A |
| Attitude Determination Accuracy | less than 0.03°(3σ) | Attitude Pointing Accuracy | less than 0.05°(3σ) |
| Attitude Stability(姿态稳定度) | less than 0.003°/s(3σ) | Attitude Manoeuvrability | more than 2°/s |
| Busbar Voltage | 9~12.3V | Battery Capacity | ≥15Ah |
| Transmission Mode | Plain/Cipher(明传/密传) | Transmission Code Rate | 400Mbps |
| Resolution | less than 1m@400km | Swath Width | more than 9.2km@400km |
| Mass | 17kg | Designed Life | more than 1 year |
推扫模式谱段:
Push Broom Spectral Band:
- PAN:450~700nm
- B1:430~510nm
- B2:510~580nm
- B3:630~690nm
- B4:740~895nm
方案设计 Programme Design
姿态控制分系统
Attitude Control Subsystem
- 轨道测量由导航接收机提供导航位速信息(位置精度5m,速度精度0.1m/s);
- 姿态测量部件包括磁强计、MEMS陀螺仪、数字太阳敏感器(精度0.5°)、光纤陀螺(零偏稳定性1.5°/h)、星敏感器(定姿精度5″);
- 中心控制单元与综合电子共用计算机,负责统一调度控制算法、任务流程、数据接口和时序等,控制频率4Hz;
- 执行机构包括反作用飞轮(最大力矩2.22mNm)、磁力矩器(最大磁矩1Am²)、推进系统(比冲0.5N,总冲600Ns)。
- Orbit measurement with positioning and velocity information(位速信息) provided by navigation receiver(positioning accuracy: 5m, velocity accuracy: 0.1m/s).
- Attitude measurement components include a magnetometer,a MEMS gyroscope, a digital sun sensor (accuracy: 0.5°), a fibre optic gyroscope (zero-bias stability:1.5°/h零偏稳定性) and star sensors (fixed attitude accuracy: 5″ 定姿精度).
- Central control unit shares the computer with integrated avionics and is responsible for unified arrangement of control algorithm, mission schedule, data interfaces and sequence with a control frequency of 4 Hz.
- Attitude control actuators include reaction wheels(max torque: 2.22 mNm), magnetorquers (max magnetic torque: 1Am²) and propulsion system (specific impulse: 0.5N, total impulse: 600Ns).
卫星的工作模式主要有箭上模式、星箭分离模式、速度阻尼模式、在轨待机模式、业务模式、轨控模式、安全模式7个工作模式;业务模式细化为推扫成像、凝视成像模式、凝视数传模式、AI图像识别模式以及数据压缩模式;当满足模式切换条件时,卫星可自主进行模式跳转,在各个模式跳转过程中,卫星能够完成各种工况下的自主配置,从而实现卫星从发射到在轨执行各种业务的稳定运行。
There are 7 working modes including launch vehicle onboard mode(舰上模式), satellite-rocket separation mode, velocity damping mode, on-orbit standby mode, working mode, orbital control mode and safety mode. The working mode is refined into push broom imaging mode, staring imaging mode, staring transmission mode, AI image recognition mode and data compression mode. Lianli can independently switch among modes if switching conditions are met. Lianli is capable of completing autonomous configuration under various working conditions during mode switching, thus ensuring the stable operation of the satellite from launch to orbit.
综合电子分系统
Integrated Avionics Subsystem
主要完成星务管理、整星时统管理、姿态控制运算、测控通信及有效载荷任务的控制管理。
The integrated avionics subsystem is mainly responsible for on board data handling, 整星时统管理, attitude control calculation, TT&C and control management of payload missions.
- 采用SOC片上系统处理器作为主控芯片,主频100MHz,集成Mems陀螺仪和磁强计;
- 提供2路CAN总线接口;
- 提供4路RS422接口;
- 提供磁力矩器驱动控制;
- 提供帆板展开信号;
- 提供星箭分离信号。
- A SOC system-on-chip processor is used as the main control chip, with a main frequency of 100 MHz. Mems gyroscope and magnetometer are integrated.
- Provides 2-way CAN bus interface.
- Provides 4-way RS422 interface.
- Provides magnetorquers’ drive control.
- Provides signals for solar arrays deployment.
- Provides signals for satellite-rocket separation.
测控数传分系统
TT&C Subsystem
采用X频段测控和数传一体化设计,降低系统的体积、重量和功耗。
TT&C and data transfer integrated system is used to reduce the subsystem’s size, mass and power consumption.
- 负责遥控、遥测信号在卫星与地面站之间的传输,以及地面测控网对卫星的跟踪;
- 负责实现载荷数据对地数传功能;
- 遥测与数传采取分时工作方式;
- 遥控遥测采用BPSK加直序扩频方式;
- 数传采用QPSK方式,速率400Mbps。
- Responsible for transmitting telemetry and control signals together with tracking from ground control.
- Responsible for data transmission from satellite to Earth.
- Time division multiplexing (TDM) is used for telemetry and data transmission.
- Control and telemetry use BPSK plus direct-sequence spread spectrum.
- QPSK is used for data transmission at 400Mbps
电源分系统
Electrical Power Subsystem
电源分系统示意图
电源分系统由太阳电池阵、锂离子蓄电池组和电源控制器组成。母线电压范围9V~12.3V。采用限压式的充电方式,太阳供电与充电功能合一。
The electrical power subsystem consists of solar arrays lithium-ion battery pack and power controller. Busbar voltage ranges from 9 V to 12.3 V. It employs a voltage-limited charging method, combining direct solar power supply and battery recharging.
- 在轨期间,为卫星提供一次电源,保证各仪器设备的正常工作;
- 发射前,由太阳电池阵模拟器为蓄电池充电;
- 为分系统单机设备或部件供电;
- 蓄电池组3串6并,容量15Ah;
- 一次母线可控配电8路,二次母线可控配电11路;
- 太阳电池阵供电能力:≥48W;
- 实现整星温度测量及加热带控制。
- Providing an on-orbit primary power supply(一次电源) for Lianli to ensure the functioning of the satellite.
- Batteries are charged by solar array simulators before launch.
- Providing power for single devices(单机设备) or components of subsystems.
- 蓄电池组3串6并,容量15Ah;
- 一次母线可控配电8路,二次母线可控配电11路;
- Solar arrays power supply capacity: ≥ 48W.
载荷分系统
Payload Subsystem
光学相机结构示意图
相机(不含对外接口)主要由反射镜组件、校正镜、主承力结构以及主背板等组成。
- 成像模式:推扫、凝视视频;
- 谱段:全色,多光谱B/G/R/NIR;
- 1m@500km;
- 静态传函:≥0.15;
- 信噪比: ≥38dB;
- 焦距:1300mm;
- 重量:3.5kg;
- 功耗:13W(成像),20W(在轨识别);
- 像元尺寸:3.2μm。
试验载荷分系统
一体姿态测量单元(AMU)与OpenHarmony
一体姿态测量单元(AMU)采用开源鸿蒙航天实时操作系统,内部集成太阳敏感器、三轴陀螺仪、三轴磁强计、温度传感器以及高性能处理器,可以实时测量航天器的三轴姿态信息,并进一步实现低精度的姿态确定功能。
- 体积:40mm×40mm×10mm;
- 质量:40g;
- 姿态确定精度:≤1°;
- 通信接口:CAN;
- 供电电压:5V±5%;
- 数据更新率:≥10Hz。
HAN推进具有绿色无毒、能量高、可实现预包装(免现场加注)等优点。推进系统采用模块化设计,集成了包括推进剂贮箱、电磁阀、压力传感器等。系统高度集成在1U空间内。
- 体积:96mm×93mm×119mm;
- 推力:~0.5N;
- 羽流全角:30°;
- 额定真空比冲:210s;
- 总冲:≥600Ns(1200Ns);
- 最小脉宽:100ms;
- 工作电压:12V。
轨道部署
UMSD部署器

部署器通过弹簧将立方星弹射出箱体,开关是通过记忆合金分离螺母完成。主要包括舱门、展开锁定机构、3D打印框架结构、分离弹簧、舱门解锁机构、蒙皮、热控组件及分离控制盒等组成。
- 分离速度:1.2m/s;
- 角度偏差:<3°;
- 解锁机构:记忆合金分离螺母;
- 通电时间:2s;
- 分离电阻:1±0.2Ω;
- 分离能量需求:<50J;
- 包络:343.5mm×470mm×516.3mm。
部署器各动作时机
- 发射段:部署器承受火箭加速度及振动引起的载荷作用。
- 停靠段:为卫星提供存储空间以及合适的空间环境,包括温度控制及空间防护。分离控制盒提供配电、温度模拟量采集转发等功能。
- 撤离段:接收到卫星分离指令后,控制解锁机构内分离螺母将销子拔出将舱门打开。卫星在弹簧的作用下弹出,实现部署。
与货船接口设计
- 安装位置需求:后锥段;
- 电气接口:提供1路100V供电,稳态功率50W;
- 指令需要:2次分离脉冲信号;
- 分离电压:0~5V;脉宽:200ms;脉冲间隔:2s;
- 在轨操作需求:无需航天员在轨操作。
空间站在轨飞行
2023年5月10日21时,大连1号—连理卫星搭载天舟六号货运飞船,随长征七号遥七运载火箭成功发射,连理卫星位于天舟六号货船后锥段。直至2024年1月12日分离前,天舟六号货船作为中国空间站的一部分在轨飞行,北京航天飞行控制中心的实时监控数据监测,连理卫星一切状态正常。
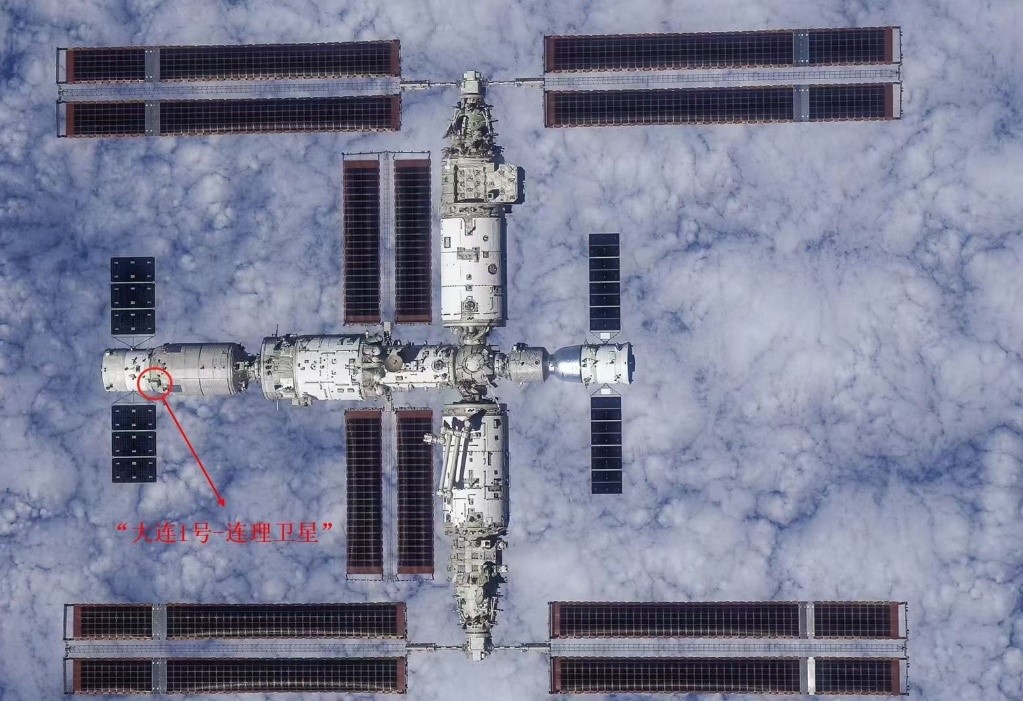
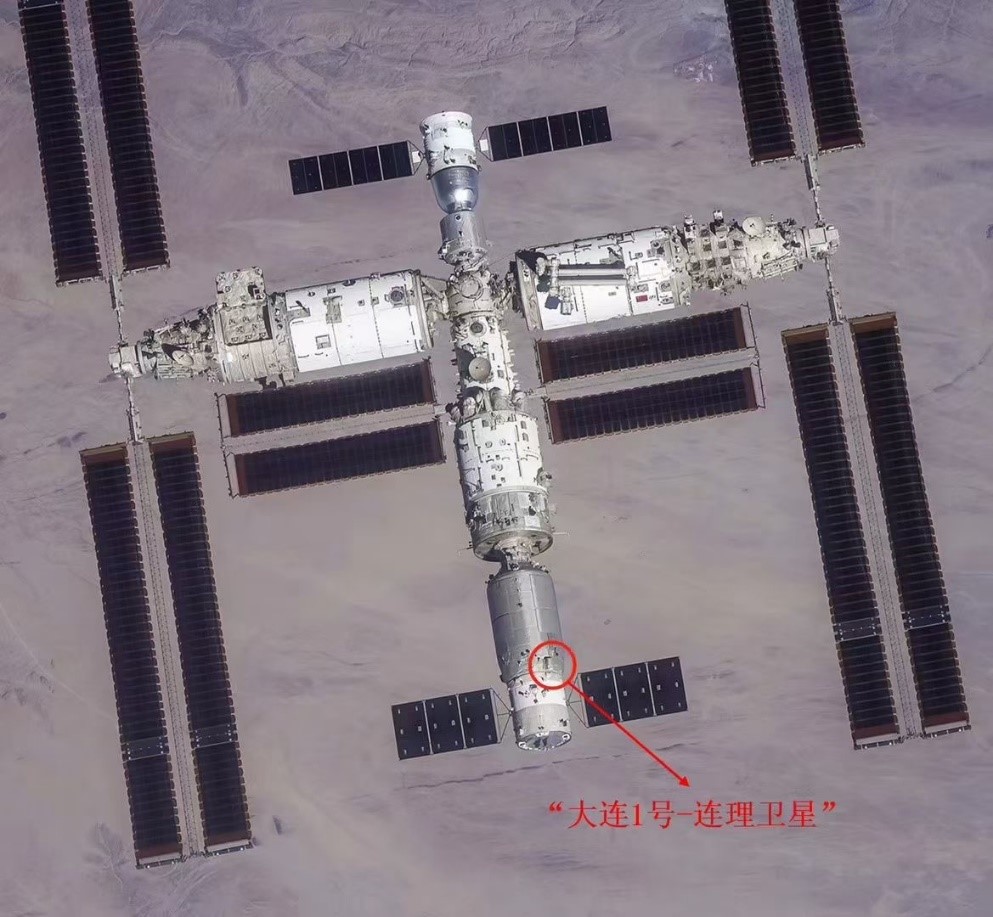
2024年1月18日14时,连理卫星与天舟六号分离,进入独立飞行阶段.
截止目前,连理卫星各系统工作正常。
技术牵引
- 连理卫星获取高分辨率图像并实现在轨目标识别,代表了同量级卫星遥感的较高水平,对相关领域发展具有重要的促进作用(图像数据将面向校内各学科免费开放下载);
- 连理卫星采用了一系列创新先进技术,包括绿色HAN推进技术、一体姿态测量技术等,对于国内微纳卫星发展具有重大意义。
- 新型微纳卫星超轻型释放机构将验证一系列先进技术。包括整体3D打印技术、多星释放与状态监测控制器技术、记忆合金分离螺母解锁机构等。已经用于国内近10种火箭/飞船型号飞行任务中。
- 连理卫星多个部组件所采用的OpenHarmony实时操作系统,在任务调度机制、硬件支持程度、开发费用、稳定性等方面都表现优异,该系统针对航天场景进行了优化,大幅提高了操作系统及各单机的可靠性。目前,大连理工大学正在牵头制定两项基于OpenHarmony的星载实时操作系统标准。
团队简介
总设计师:夏广庆,工学博士,大连理工大学力学与航空航天学院教授,现任大连理工大学力学与航空航天学院党委书记,主要研究方向为电推进理论与实验、先进空间推进系统设计、微纳卫星总体设计、飞行器流固耦合模拟与测试等。夏广庆–大连理工大学教师主页
总指挥:于晓洲,工学博士,大连理工大学力学与航空航天学院教授,主要研究方向为微小卫星、航天器系统工程、微小卫星先进部组件等。目前全世界唯一一支团队,其研制的立方星搭载过美国的天鹅座(Cygnus)飞船也搭乘过中国的天舟飞船,去过国际空间站也去过中国空间站于晓洲–大连理工大学教师主页
Chief Commander: Xiaozhou Yu, doctor of Engineering, is a professor at the School of Mechanics and Aerospace of Dalian University of Technology. His main research interests include CubeSats, spacecraft system engineering, and advanced components for CubeSats. At present, his team is the only team in the world whose CubeSats has been carried by both American Cygnus and Chinese Tianzhou, and has been to both the International Space Station and the Chinese Space Station.

(Translated by Yichen Wang)

![Dalian 1-Lianli Satellite [Document]](https://intellink-01.oss-cn-beijing.aliyuncs.com/images/lianli/working.jpg)